
KDDIńĘÅńĀöŃü©ķüĀķÜöµōŹõĮ£ŃāŁŃā£ŃāāŃāłńö©µśĀÕāÅõ╝ØķĆüµŖĆĶĪōŃü¦50Ńā¤Ńā¬ń¦ÆŃü«ĶČģõĮÄķüģÕ╗ȵśĀÕāÅõ╝ØķĆüŃéÆÕ«¤ńÅŠ
2020Õ╣┤7µ£ł10µŚź
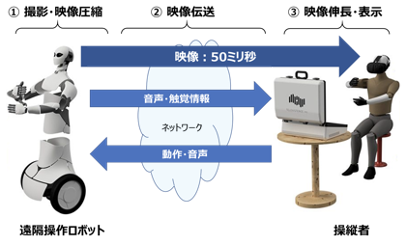
µĀ¬Õ╝Åõ╝ÜńżŠKDDIńĘÅÕÉłńĀöń®ČµēĆ’╝łµ£¼ńżŠ’╝ÜÕ¤╝ńÄēń£īŃüĄŃüśŃü┐ķćÄÕĖéŃĆüõ╗ŻĶĪ©ÕÅ¢ńĘĀÕĮ╣µēĆķĢĘ’╝ÜõĖŁµØæ ÕģāŃĆüõ╗źõĖŗŃĆüŃĆīKDDIńĘÅÕÉłńĀöń®ČµēĆŃĆŹ’╝ēŃü©TelexistenceµĀ¬Õ╝Åõ╝ÜńżŠ (µ£¼ńżŠ: µØ▒õ║¼ķāĮµĖ»Õī║ŃĆüõ╗ŻĶĪ©ÕÅ¢ńĘĀÕĮ╣CEO: Õ»īÕ▓Ī õ╗üŃĆüõ╗źõĖŗŃĆīTXŃĆŹ)Ńü»ŃĆüTXŃüīķ¢ŗńÖ║ŃüÖŃéŗķüĀķÜöµōŹõĮ£ŃāŁŃā£ŃāāŃāłŃéÆÕ»ŠĶ▒ĪŃü½ŃĆüŃāŁŃā£ŃāāŃāłŃü©µōŹńĖ”ĶĆģķ¢ōŃü«µśĀÕāÅõ╝ØķĆüŃü½ŃüŖŃüäŃü”ŃĆüŃāŁŃā£ŃāāŃāłÕü┤Ńü«Ńé½ŃāĪŃā®ŃüŗŃéēµōŹńĖ”ĶĆģÕü┤Ńü«ŃāćŃéŻŃé╣ŃāŚŃā¼ŃéżŃü½ĶĪ©ńż║ŃüĢŃéīŃéŗŃüŠŃü¦Ńü«End-to-EndķüģÕ╗ČŃü©ŃüŚŃü”µźŁńĢīµ£Ćķ½śµ░┤µ║¢(µ│©1)Ńü«50Ńā¤Ńā¬ń¦Æ(µ│©2)ŃéÆÕ«¤ńÅŠŃüŚŃüŠŃüŚŃü¤ŃĆéŃüōŃéīŃü½ŃéłŃéŖĶ”¢Ķ”ÜŃü©Ķ║½õĮōµä¤Ķ”ÜŃü©Ńü«µōŹõĮ£Ńü«ŃüÜŃéīŃéÆŃü╗Ńü╝µä¤ŃüśŃéŗŃüōŃü©ŃüīŃü¬ŃüÅŃü¬ŃéŖŃĆüÕŗĢŃüŹŃü«ķƤŃüäÕ»ŠĶ▒Īńē®Ńü½Õ»ŠŃüŚŃü”µŁŻńó║Ńü¬µōŹõĮ£ŃéäĶ║½õĮōńÜäńø┤µä¤Ńü½ÕŹ│ŃüŚŃü¤µōŹõĮ£ŃüīÕÅ»ĶāĮŃü½Ńü¬ŃéŗŃü©Õģ▒Ńü½ŃĆüµśĀÕāÅõ╝ØķĆüķüģÕ╗ČŃüīÕĤÕøĀŃü«õĖĆŃüżŃü©ŃüĢŃéīŃéŗµōŹńĖ”ĶĆģŃü«VRķģöŃüäŃüīĶ╗ĮµĖøŃüĢŃéīķĢʵÖéķ¢ōŃü«ķüĀķÜöµōŹõĮ£ŃüīÕÅ»ĶāĮŃü©Ńü¬ŃéŖŃüŠŃüÖŃĆéKDDIńĘÅÕÉłńĀöń®ČµēĆŃü©TXŃü»ŃĆüõ╗ŖÕŠīŃééķüĀķÜöµōŹõĮ£ŃāŁŃā£ŃāāŃāłŃü«Õ«¤ńö©Õī¢Ńü½ÕÉæŃüæŃü¤ÕÅ¢ŃéŖńĄäŃü┐ŃéÆķĆ▓ŃéüŃü”ŃüäŃüŹŃüŠŃüÖŃĆé
ķüĀķÜöµōŹõĮ£ŃāŁŃā£ŃāāŃāłŃü»ŃĆüVRŃé░Ńā®Ńé╣ŃéÆĶŻģńØĆŃüŚŃü¤µōŹńĖ”ĶĆģŃüīŃāŁŃā£ŃāāŃāłŃüŗŃéēõ╝ØķĆüŃüĢŃéīŃéŗµśĀÕāÅŃéÆĶ”ŗŃü¬ŃüīŃéēµōŹõĮ£ŃüŚŃüŠŃüÖŃĆ鵜ĀÕāÅõ╝ØķĆüŃü½õ╝┤ŃüåEnd-to-EndķüģÕ╗ČŃüīŃüŖŃüŖŃéłŃüØ100Ńā¤Ńā¬ń¦ÆŃéÆĶČģŃüłŃéŗŃü©Ķ”¢Ķ”ÜŃü©µōŹõĮ£Ńü«ŃüÜŃéīŃéÆÕż¦ŃüŹŃüŵä¤ŃüśŃéŗŃü¤Ńéü(µ│©3)ŃĆüõĮÄķüģÕ╗ČÕī¢ŃüīÕ«¤ńö©Õī¢Ńü½ÕÉæŃüæŃü”Ńü«Ķ¬▓ķĪīŃü¦ŃüŚŃü¤ŃĆ鵜ĀÕāÅõ╝ØķĆüŃü«End-to-EndķüģÕ╗ČŃü»ŃĆüÕż¦ŃüŹŃüÅ3ŃüżŃü«Ķ”üÕøĀŃĆüŌæĀŃāŁŃā£ŃāāŃāłÕü┤Ńü½ŃüŖŃüæŃéŗŃé½ŃāĪŃā®ŃüŗŃéēŃü«µśĀÕāÅÕÅ¢ÕŠŚŃü©µśĀÕāÅÕ£¦ńĖ«ŃĆüŌæĪµśĀÕāÅŃāćŃā╝Ńé┐Ńü«õ╝ØķĆü’╝łŃāŹŃāāŃāłŃā»Ńā╝Ńé»ķüģÕ╗ČŃééÕɽŃéĆ’╝ēŃĆüŌæóµōŹńĖ”ĶĆģÕü┤Ńü½ŃüŖŃüæŃéŗµśĀÕāÅõ╝ĖķĢĘŃü©ĶĪ©ńż║ŃĆüŃü½ĶĄĘÕøĀŃüŚŃü”ŃüŖŃéŖŃĆüµśĀÕāÅõ╝ØķĆüŃéĘŃé╣ŃāåŃāĀķ¢ŗńÖ║Ńü½ŃüŖŃüäŃü”Ńü»ŃĆüµÆ«ÕĮ▒ŃüŗŃéēĶĪ©ńż║ŃüŠŃü¦Ńü«ŃĆüŃüÖŃü╣Ńü”Ńü«ŃāŚŃāŁŃé╗Ńé╣Ńü½ŃüŖŃüæŃéŗÕŠ╣Õ║ĢńÜäŃü¬Õć”ńÉåŃü«µ£Ćķü®Õī¢ŃüīķćŹĶ”üŃü©Ńü¬ŃüŻŃü”ŃüäŃüŠŃüÖŃĆé
õ╗ŖÕø×ŃĆüTXŃü«ķüĀķÜöµōŹõĮ£ŃāŁŃā£ŃāāŃāłńö©µśĀÕāÅõ╝ØķĆüŃéĘŃé╣ŃāåŃāĀŃü¦ŃĆüKDDIńĘÅÕÉłńĀöń®ČµēĆŃü«µ▒Äńö©ŃāÅŃā╝ŃāēŃé”Ńé¦ŃéóŃé│Ńā╝ŃāćŃāāŃé»(µ│©4)ŃéÆńö©ŃüäŃü¤µśĀÕāÅŃāæŃā®ŃāĪŃā╝Ńé┐ŃéäÕć”ńÉåŃāĢŃāŁŃā╝Ńü«µ£Ćķü®Õī¢µŖĆĶĪōŃü©ŃĆüTXŃü«ŃāŁŃā£ŃāāŃāłńö©µśĀÕāŵ®¤ÕÖ©Ńü«Õ«¤ĶŻģŃā╗µ£Ćķü®Õī¢µŖĆĶĪōŃü½ŃéłŃéŖŃĆüÕ░ÅÕ×ŗŃā╗Õ«ēõŠĪŃü¬µ®¤ÕÖ©µ¦ŗµłÉŃü¦ŃĆüµźŁńĢīµ£Ćķ½śµ░┤µ║¢Ńü«50Ńā¤Ńā¬ń¦ÆŃü«ĶČģõĮÄķüģÕ╗ȵśĀÕāÅõ╝ØķĆüŃéÆÕ«¤ńÅŠŃüŚŃüŠŃüŚŃü¤ŃĆéŃüōŃéīŃü½ŃéłŃéŖŃĆüÕŗĢŃüŹŃü«ķƤŃüäÕ»ŠĶ▒Īńē®Ńü½Õ»ŠŃüŚŃü”õ┐ŖµĢÅŃü½ÕÅŹÕ┐£ŃüÖŃéŗŃüōŃü©ŃüīŃü¦ŃüŹŃĆüŃéłŃéŖµŁŻńó║Ńü¬ķüĀķÜöµōŹõĮ£ŃüīÕÅ»ĶāĮŃü½Ńü¬ŃéŗŃü©Õģ▒Ńü½ŃĆüÕŠōµØźŃĆüµśĀÕāÅõ╝ØķĆüķüģÕ╗ČŃüīÕĤÕøĀŃü«õĖĆŃüżŃü©ŃüĢŃéīŃéŗµōŹńĖ”ĶĆģŃü«VRķģöŃüäŃüīĶ╗ĮµĖøŃüĢŃéīŃĆüŃéłŃéŖÕ┐½ķü®Ńü½ķüĀķÜöõĮōķ©ōŃéƵźĮŃüŚŃéōŃüĀŃéŖķĢʵÖéķ¢ōŃü«ķüĀķÜöõĮ£µźŁŃéÆĶĪīŃüŻŃü¤ŃéŖŃüÖŃéŗŃüōŃü©ŃüīÕÅ»ĶāĮŃü½Ńü¬ŃéŖŃüŠŃüÖŃĆé
Ńé│ŃāŁŃāŖń”ŹŃü¦ÕŖĀķƤŃüÖŃéŗŃāŗŃāźŃā╝ŃāÄŃā╝Ńā×Ńā½Ńü¬µÖéõ╗ŻŃéÆĶ┐ÄŃüłŃĆüķüĀķÜöµōŹõĮ£ŃāŁŃā£ŃāāŃāłŃü«µ┤╗ńö©ŃüĖŃü«µ£¤ÕŠģŃü»ŃüŠŃüÖŃüŠŃüÖķ½śŃüŠŃüŻŃü”ŃüäŃüŠŃüÖŃĆéKDDIńĘÅÕÉłńĀöń®ČµēĆŃü©TXŃü»ŃĆüõ╗ŖÕø×Ńü«ĶČģõĮÄķüģÕ╗ȵśĀÕāÅõ╝ØķĆüµŖĆĶĪōŃü½ķ¢óŃüÖŃéŗķĆŻµÉ║Ńü½ÕŖĀŃüłŃĆüKDDIńĘÅÕÉłńĀöń®ČµēĆŃü«ńö╗ÕāÅĶ¬ŹĶŁśµŖĆĶĪōŃéÆTXŃü«ŃāŁŃā£ŃāāŃāłŃüĖÕ┐£ńö©ŃüŚŃü¤ŃāŁŃā£ŃāāŃāłŃāōŃéĖŃā¦Ńā│µŖĆĶĪōŃü½ŃüŖŃüäŃü”ŃééķĆŻµÉ║ŃéÆÕø│ŃéŖŃĆüŃāŁŃā£ŃāāŃāłŃéä5GŃéÆńö©ŃüäŃü¤µŚźÕĖĖńö¤µ┤╗ŃéäŃāōŃéĖŃāŹŃé╣ŃéĘŃā╝Ńā│Ńü½ŃüŖŃüäŃü”ŃĆüŃüŖÕ«óµ¦śŃü«õĮōķ©ōõŠĪÕĆżŃéÆÕÉæõĖŖŃüÖŃéŗÕģłķĆ▓ńÜäŃü¬ÕÅ¢ŃéŖńĄäŃü┐ŃéÆķĆ▓ŃéüŃü”ŃüäŃüŹŃüŠŃüÖŃĆéŃüŠŃü¤ŃĆüKDDIńĘÅÕÉłńĀöń®ČµēĆŃü»ŃüōŃéīŃéēŃü«õĮÄķüģÕ╗ČÕī¢µŖĆĶĪōŃéÆŃĆüKDDIńĘÅÕÉłńĀöń®ČµēĆŃü¦ķ¢ŗńÖ║ŃüÖŃéŗMPEGŃā®ŃéżŃā¢Ńā®Ńā¬MP-FactoryŃéäķüĀķÜöõĮ£µźŁµö»µÅ┤ŃéĘŃé╣ŃāåŃāĀVistaFinder MxŃüĖÕ┐£ńö©ŃüŚÕ╣ģÕ║āŃüäÕł®ńö©ŃéĘŃā╝Ńā│Ńü½ŃüŖŃüæŃéŗõĮÄķüģÕ╗ȵśĀÕāÅõ╝ØķĆüŃéÆÕ«¤ńÅŠŃüŚŃü”ŃüäŃüŹŃüŠŃüÖŃĆéTXŃü»µ£¼ÕżÅķ¢ŗÕ¦ŗŃüĢŃéīŃéŗÕĢåńö©Õī¢ŃāŁŃā£ŃāāŃāłŃüĖŃü©µ£¼µŖĆĶĪōŃéÆÕ«¤ĶŻģŃüŚŃĆüõ║║ŃĆģŃü«ķüĀķÜöÕ░▒ÕŖ┤ŃāŚŃā®ŃāāŃāłŃāĢŃé®Ńā╝ŃāĀŃĆīAWPŃĆŹ(Augmented Workforce Platform)Ńü«µŚ®µ£¤Õ«¤ńÅŠŃéÆŃüŚŃĆüķüĀķÜöÕī¢Ńā╗Ķć¬ÕŗĢÕī¢Ńü«ŃéĮŃā¬ŃāźŃā╝ŃéĘŃā¦Ńā│ŃéÆõĖ¢Ńü«õĖŁŃü½Õ▒ŖŃüæŃü”ŃüäŃüŹŃüŠŃüÖŃĆé
µ│©1’╝ÜķüĀķÜöµōŹõĮ£ŃāŁŃā£ŃāāŃāłÕÉæŃüæŃü«µśĀÕāÅõ╝ØķĆüŃü½ŃüŖŃüäŃü”ŃĆüÕøĮķÜøµ©Öµ║¢Ńü«µśĀÕāÅń¼”ÕÅĘÕī¢µ¢╣Õ╝ÅH.265/HEVCŃéÆńö©ŃüäŃü¤End-to-EndŃü«ķüģÕ╗ČŃü©ŃüŚŃü”µźŁńĢīµ£Ćķ½śµ░┤µ║¢ŃĆé(2020Õ╣┤7µ£ł9µŚźµÖéńé╣ŃĆüKDDIńĘÅÕÉłńĀöń®ČµēĆĶ¬┐Ńü╣)ŃĆéõ╝ØķĆüķüģÕ╗ČŃü»ķĆÜõ┐ĪńÆ░ÕóāŃü½ŃéłŃéŖÕżēÕī¢ŃüÖŃéŗŃĆé
µ│©’╝Æ’╝ܵśĀÕāÅŃüīŃāŁŃā£ŃāāŃāłÕü┤Ńü«Ńé½ŃāĪŃā®Ńü½ÕģźÕŖøŃüĢŃéīŃü”ŃüŗŃéēµōŹńĖ”ĶĆģÕü┤Ńü«ŃāćŃéŻŃé╣ŃāŚŃā¼ŃéżŃü½ĶĪ©ńż║ŃüĢŃéīŃéŗŃüŠŃü¦Ńü«µÖéķ¢ō(ŃāŹŃāāŃāłŃā»Ńā╝Ńé»ķüģÕ╗ČŃéÆÕɽŃéĆ)ŃĆéŃĆīŃā¤Ńā¬ń¦ÆŃĆŹŃü»1000ÕłåŃü«1ń¦ÆŃĆé
µ│©3’╝ÜŃĆīŃāåŃā¼ŃéżŃé░ŃéĖŃé╣Ńé┐Ńā│Ńé╣Ńü«ńĀöń®Č(ń¼¼63ÕĀ▒) -TELESAR3Ńü½ŃüŖŃüäŃü”Ķ©▒Õ«╣ŃüĢŃéīŃéŗķĆÜõ┐ĪķüģÕ╗ČŃü«µż£Ķ©ÄŃĆŹÕÅéńģ¦
https://tachilab.org/content/files/publication/study_on_telexistence/te063.pdf
µ│©4’╝ܵ▒Äńö©PCŃéäµ▒Äńö©Ńā£Ńā╝ŃāēŃü½µÉŁĶ╝ēŃüĢŃéīŃü”ŃüäŃéŗŃĆüŃāÅŃā╝ŃāēŃé”Ńé¦ŃéóŃéÆńö©ŃüäŃü¤µśĀÕāÅŃü«Õ£¦ńĖ«Ńā╗õ╝ĖķĢĘŃéÆĶĪīŃüåŃü¤ŃéüŃü«µ®¤ĶāĮ
<õ╝ÜńżŠµ”éĶ”ü>
õ╝ÜńżŠÕÉŹ ’╝ÜTelexistenceµĀ¬Õ╝Åõ╝ÜńżŠ
µēĆÕ£©Õ£░ ’╝ܵĖ»Õī║Ķź┐µ¢░µ®ŗ’╝ÆõĖüńø«’╝æ’╝ÖńĢ¬Õ£░’╝ĢÕÅĘ’╝ōÕÅĘ
õ╗ŻĶĪ©ĶĆģ ’╝Üõ╗ŻĶĪ©ÕÅ¢ńĘĀÕĮ╣ŃĆĆÕģ╝ŃĆƵ£Ćķ½śńĄīÕ¢ČĶ▓¼õ╗╗ĶĆģŃĆĆÕ»īÕ▓ĪŃĆĆõ╗ü
Ķ©Łń½ŗÕ╣┤µ£łµŚź ’╝Ü’╝Æ’╝É’╝æ’╝ŚÕ╣┤’╝æµ£ł’╝Æ’╝ōµŚź
URL ’╝Ühttps://tx-inc.com
’╝£µ£¼õ╗ČŃü½ķ¢óŃüÖŃéŗŃüŖÕĢÅŃüäÕÉłŃéÅŃüø’╝×
Email ’╝Üinfo@tx-inc.com
µŗģÕĮō ’╝Üń¤│ÕĘØ


Ķ┐öõ┐ĪŃéƵ«ŗŃüÖ
Want to join the discussion?Feel free to contribute!